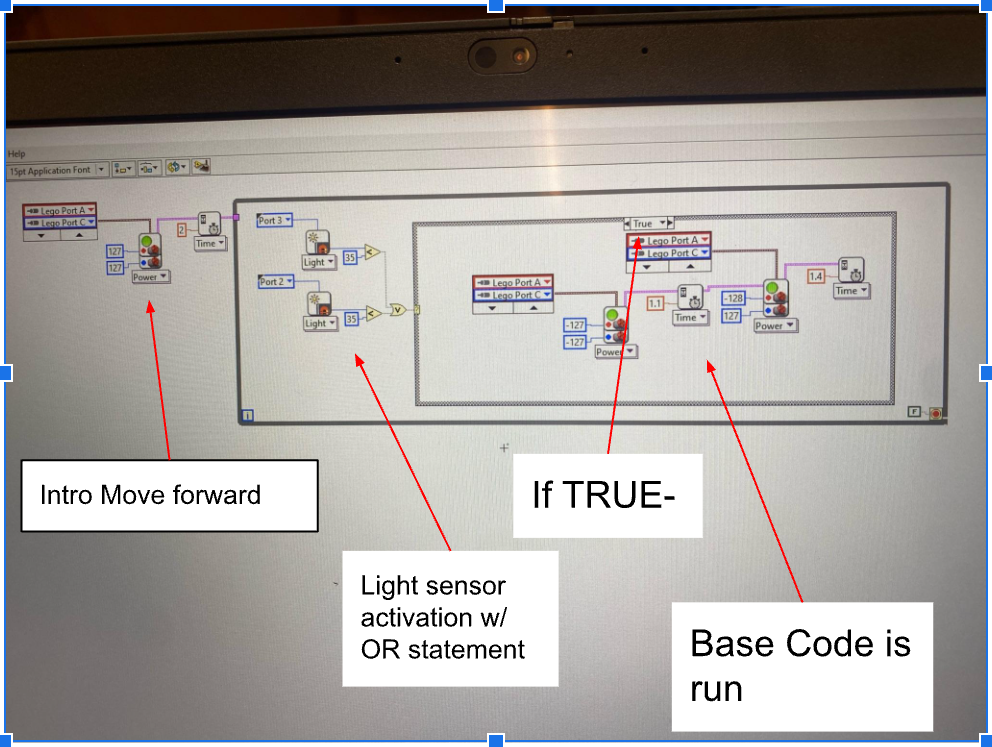
A labeled overview of the code needed to run my BattlebBot.

Detailed overview of how the code helped my robot.
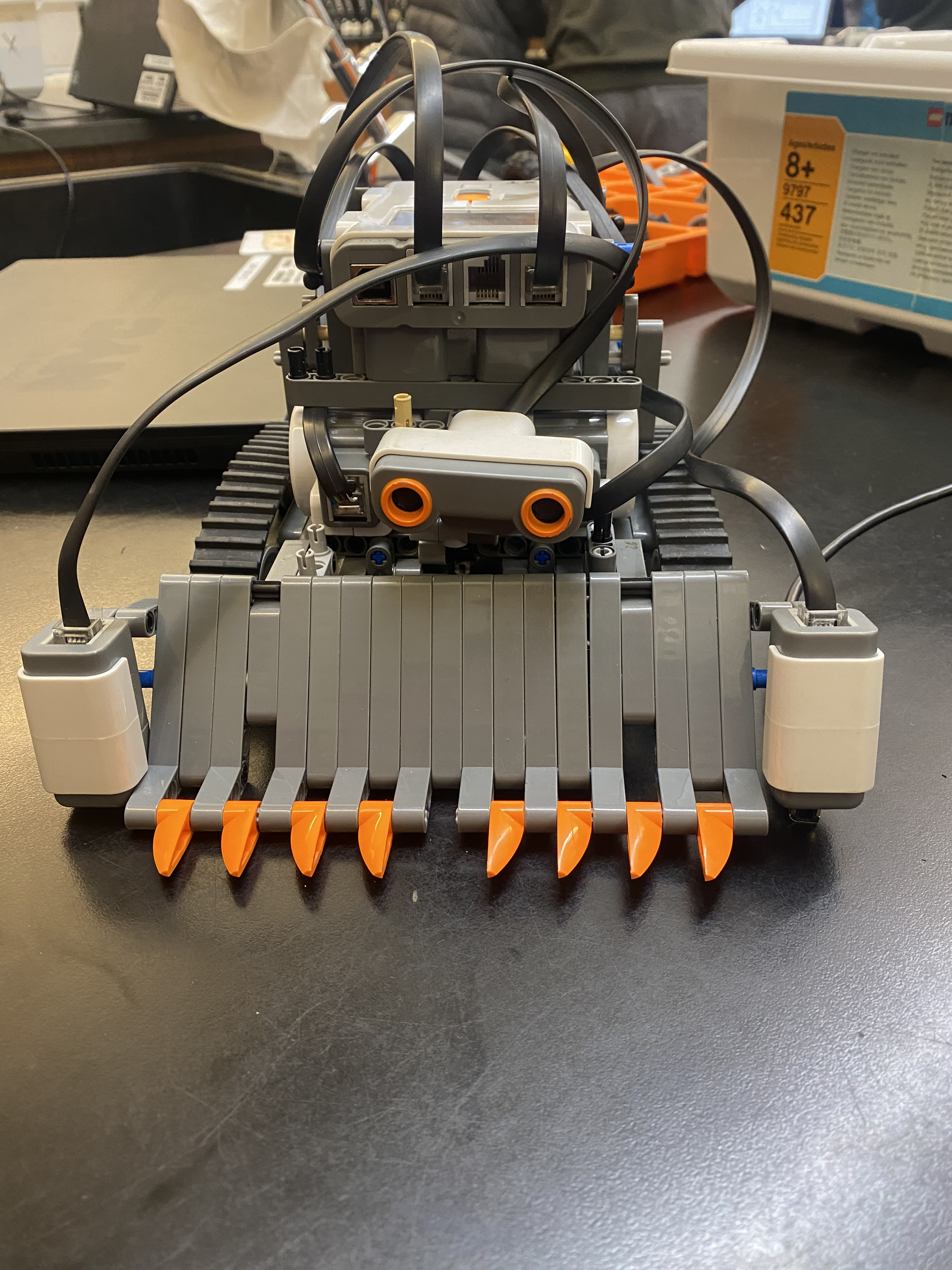
A front view of my BattleBot. Treads are used, combined with the weight of the BattleBot to keep it on the ground and prevent it from tilting. The front scoop flips other robots, while also adding stability. The ultrasonic sensor, seen in the middle, helps the robot to know when to turn or stop. Also seen are two light sensors on either side of the scoop, which tell the robot to turn around if it reaches the area boundary.
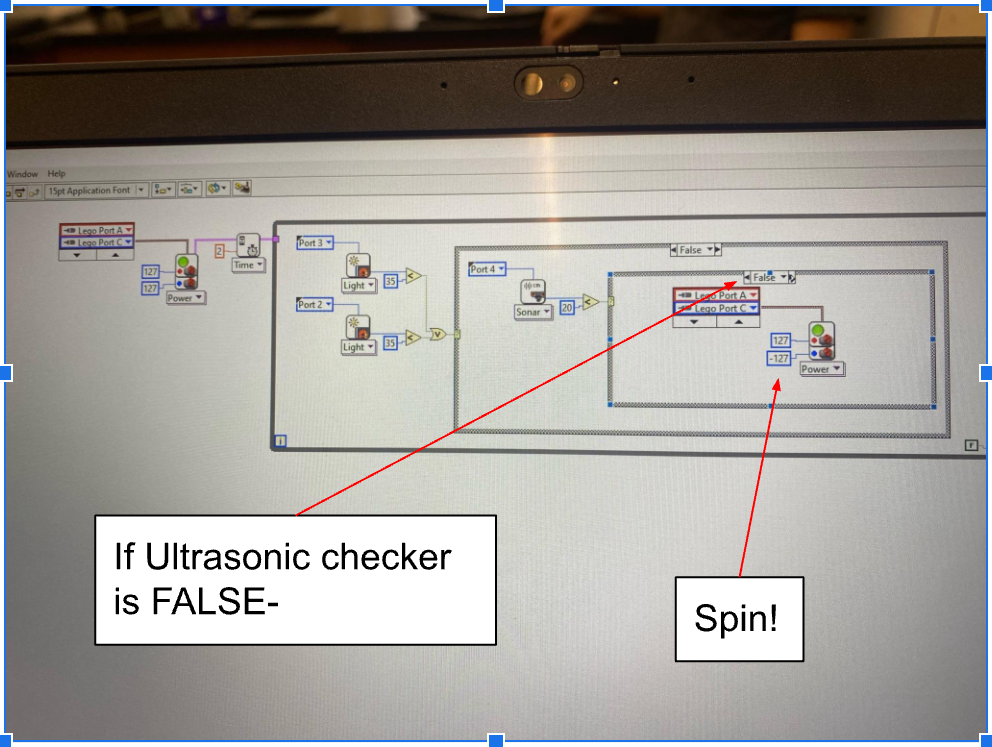
A labeled overview of the code needed to run my BattlebBot.
Detailed overview of how the code helped my robot.